2020年6月13日作成,2020年6月15日更新
交流 RL 直列回路の電圧・電流波形を MATLAB・Octave で描いてみた。
RL 直列回路
抵抗 R,インダクタンス L を直列に接続した回路に交流電源電圧 e を加えたとき,電流 i が流れたとする。
交流電源電圧の波形と RL 直列回路に流れる電流の波形を描く。

プログラム
V1=100*sqrt(2);%[V]
f1=60;%[Hz]
R1=7.5;%[Ohm]
L1=20e-3;%[H]
omega=2*pi*f1;%[rad/s]
t1=linspace(0,0.05,200);
theta=0;%[rad]
Z1=sqrt(R1^2+(omega*L1)^2);
phi=atan(omega*L1/R1);
v1=V1*sin(omega*t1-theta);
i1=V1/Z1*sin(omega*t1-theta-phi);
figure(1);
plot(t1,v1,t1,i1);
grid on;
title('RL circuit');
xlabel('time [s]');ylabel('Voltage [V], Current [A]');
legend('v','i');
計算条件
プログラムにおいて,交流電源電圧の大きさを 100 V(実効値),交流電源電圧の初期位相を 0 rad,周波数を 60 Hz,抵抗 R の大きさを 75 Ω,インダクタンス L の大きさを 20 mH とした。
なお,計算時間刻みは,0 〜 0.05 秒の範囲で等間隔の 200 点とした。
電圧・電流波形
上記の条件で計算した RL 直列回路の電圧・電流波形を下図に示す。
図において,青線は電圧波形,赤線は電流波形である。
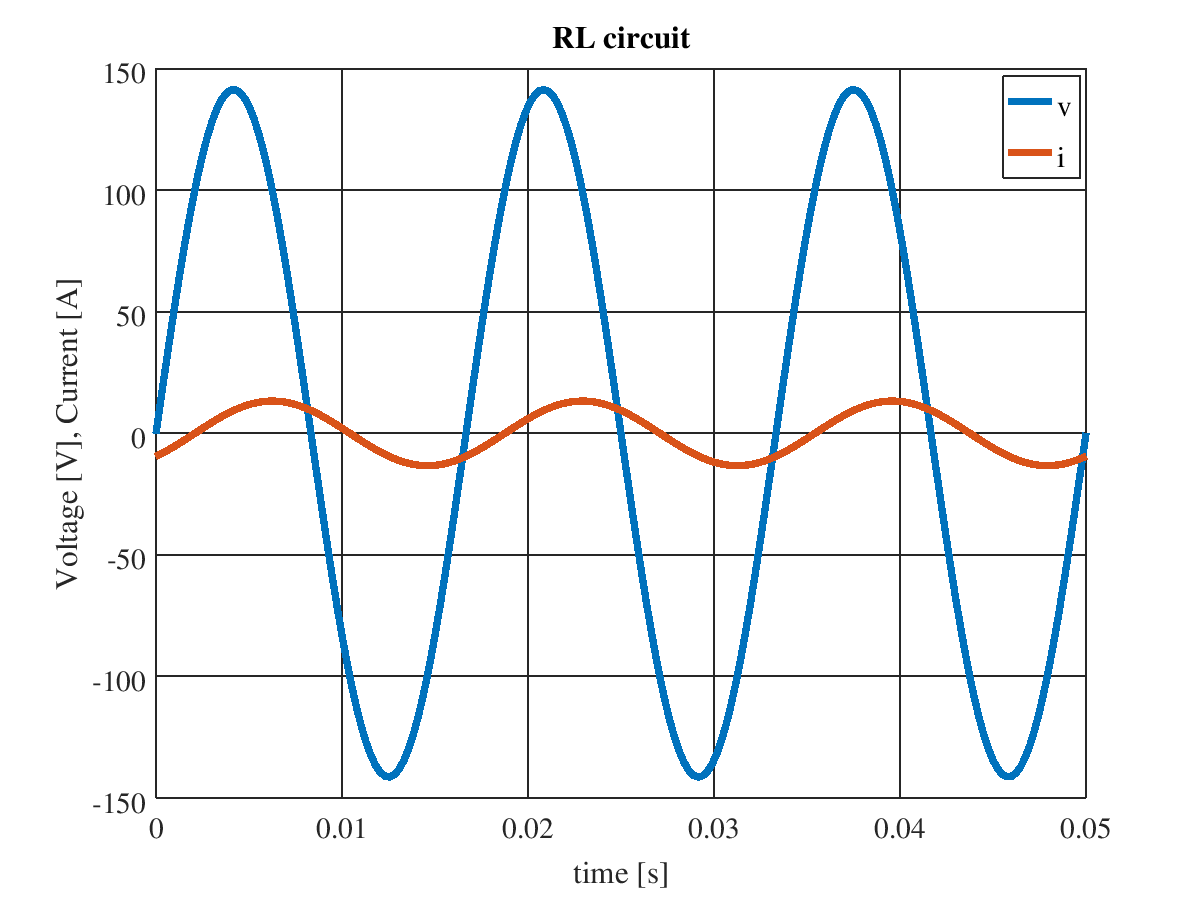
青線で示す電圧波形よりも,赤色で示す電流波形の方が進んでいることがわかる。
なお,今回の計算条件では,RL 直列回路のインピーダンス Z は 10.635 Ω,電圧,電流の位相差は 0.78805 [rad](電圧基準で進みを + で表記)である。
![[アールエル ソックス] 靴下 5本指ランニングソックス Type-G 超立体製法 フィット&グリップ 滑り止め搭載 スタンダードモデル TF-2000 ブラック/チャコール 日本 M(24~26cm) (日本サイズM相当)](https://m.media-amazon.com/images/I/41kTNIpkoyL._SL160_.jpg "[アールエル ソックス] 靴下 5本指ランニングソックス Type-G 超立体製法 フィット&グリップ 滑り止め搭載 スタンダードモデル TF-2000 ブラック/チャコール 日本 M(24~26cm) (日本サイズM相当)")
- 発売日: 2018/12/13
- メディア: ウェア&シューズ
更新履歴
- 2020年6月13日 新規作成
- 2024年1月28日 検索エンジン向けタイトル「RL直列回路の電圧と電流の波形解析」,SNS 向けタイトル「MATLAB・Octaveで描いたRL直列回路の電圧・電流波形を解説! #RL直列回路 #電圧波形 #電流波形」を追加